東京電機独自開発の移動電源車(軽車両Ver.)

今まで有りそうで無かった軽の4WD車ベースで独自に制作された移動電源車です。
発電機を現場に運びたくても道幅、道路状況、発電機の大きさ(重さ)、必要な発電力のものを思うように運び込むことが出来なかった事は多々あるのではないでしょうか。
使う側としますと、電源車は色々なケースに合った規格、仕様でバリエーション豊富であるべきだと考えますが、その要望に応えるのはメーカーとしては大変だと思います。
この移動電源車は本当にチャレンジの1台だと感じます。
今回は足元の悪い災害現場で電源が必要な中、電源車を救助現場まで運び資機材を動かす電源を確保するという想定での訓練で威力を発揮して頂きました。


小型ベルコン&遠隔操縦キャリアダンプを使った検証

持ち運びしやすいベルトコンベアを、実際の現場を想定して訓練に使った場合の検証を行いました。使い勝手はどうか、安定性はどうか、扱いやすさ、どのように使えばいいか等々を確認しました。
また、ベルコン、発電機、その他資機材は遠隔操縦のキャリアダンプの荷台に載せて運ぶ、任務完了後それらの資機材を載せて戻ってくる等の検証も行いました。両方とも予想以上の成果を出しましたが、細かい部分でクリアにしていかなければいけない点もあり、仕様で変更するか、運用でその部分を補っていくか等が次回の課題になりました。

移動電源車&電波車両の実証実験

大規模な災害現場では電源、通信の両方をロスすることが十分に考えられます。
そのような現場でも救助に必要な電源、通信を確保するための実証実験を行っています。
通信車はローカルネットワークを想定現場内に張り巡らしますが、範囲はどの程度か、電波の強さは、安定性は、どの程度まで複数の通信機器を使う事が出来るか等を検証します。
※他のローカルネットワークとの同時比較などもこの時は行いました。
また移動電源車は、電源の接続のし易さ、安定性、どの程度接続できる、静寂性等も非常に重要な検証項目になります。

※複数のローカルネットワークのアンテナが設置されています。
※東京電機さん、ウェルソックさん、ブイキューブさんが参加されました。
複数画像を一元管理(指揮所)で確認出来るシステム検証
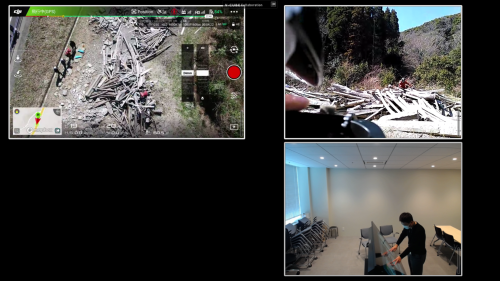
UAV(ドローン)画像、救助隊員目線画像、対策本部の画像を現場指揮所側で一元管理する訓練を行いながらの検証実験。
隊員の目線カメラ、ドローンからの画像を一つの画面でリアルタイムに状況確認を行う事が出来る。
この日は2か所(2現場)同時に救助訓練を行っていた。
映像へのメモ書き、進捗メモ等を全員で共有することも出来る。(ブイキューブさんシステム)


隊員の健康状況

救助にあたる隊員の健康状況もリアルタイムで確認出来るようにする取り組みも検証をしています。
但し、これも現場の通信状況により安定しないのが現状です。
こちらの画像ではあるタイミングで隊員のバイタルに異常値が出ました。これは丁度隊員が要救助者を土砂の中から発見し、周りの土砂の輩出作業時に検出されたものです。
これらが安定して検出できるようになれば、異常値を検出した段階で別の隊員への交代等の指示を出す事が出来るようになります。
また、要救助者に装置を付けてバイタルの変化なども同時に監視出来るようになる事も期待できます。
救助隊員の目線カメラ

救助隊員が観ている現場映像を、リアルタイムに指揮所で確認出来る事は非常に有効な手段です。
しかし実際の現場では各種の通信電波が混在する、電波状況が良い所、悪い所もある、隊員が増えればそれを写すモニター側での処理問題等、数々の課題が都度発生します。
これなら間違いないという状況をまだ見つけられません。課題解決までにはまだまだかかりそうです。
